A matched filter maximizes the signal-to-noise ratio for detecting a known signal in noisy environments, while a correlator measures the similarity between two signals by computing their cross-correlation. Understanding their distinct roles helps you choose the right technique for effective signal processing; explore the rest of the article to dive deeper into their differences and applications.
Table of Comparison
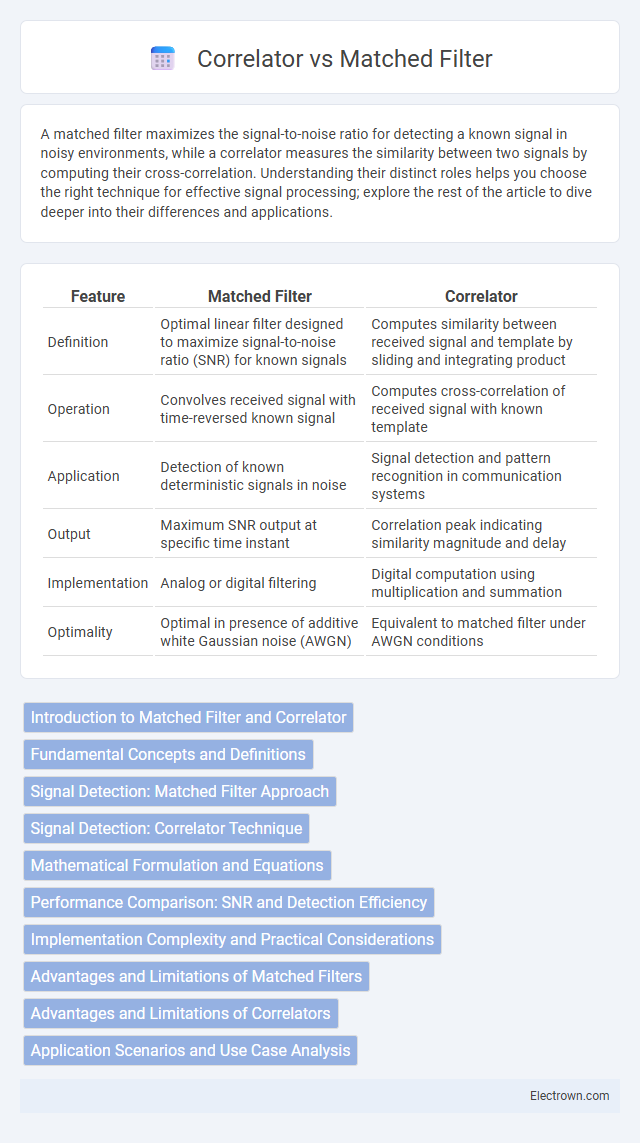
| Feature | Matched Filter | Correlator |
|---|---|---|
| Definition | Optimal linear filter designed to maximize signal-to-noise ratio (SNR) for known signals | Computes similarity between received signal and template by sliding and integrating product |
| Operation | Convolves received signal with time-reversed known signal | Computes cross-correlation of received signal with known template |
| Application | Detection of known deterministic signals in noise | Signal detection and pattern recognition in communication systems |
| Output | Maximum SNR output at specific time instant | Correlation peak indicating similarity magnitude and delay |
| Implementation | Analog or digital filtering | Digital computation using multiplication and summation |
| Optimality | Optimal in presence of additive white Gaussian noise (AWGN) | Equivalent to matched filter under AWGN conditions |
Introduction to Matched Filter and Correlator
A matched filter is a signal processing technique designed to maximize the signal-to-noise ratio (SNR) for detecting a known waveform in noisy data, making it optimal for maximizing detection probability in the presence of white Gaussian noise. A correlator operates by measuring the similarity between two signals, typically the received signal and a known template or reference waveform, through an inner product or convolution operation. Both matched filters and correlators are fundamental in communication systems and radar applications, where signal detection and timing synchronization are critical.
Fundamental Concepts and Definitions
Matched filters optimize signal detection by maximizing the signal-to-noise ratio (SNR) for known deterministic signals immersed in additive white Gaussian noise. Correlators compute the similarity between an incoming signal and a reference template by evaluating the inner product or cross-correlation, effectively measuring signal alignment. Both techniques are mathematically equivalent for detecting known signals, but a matched filter is implemented as a linear filter, whereas a correlator is typically realized through direct multiplication and integration.
Signal Detection: Matched Filter Approach
The matched filter is optimal for detecting known signals embedded in noise by maximizing the signal-to-noise ratio through convolution with a time-reversed replica of the expected signal. Unlike correlators, which compute similarity without noise optimization, the matched filter exploits prior knowledge of the signal waveform and noise characteristics to enhance detection accuracy. This approach is widely applied in radar, communications, and sonar systems to improve the reliability of signal detection under stochastic noise conditions.
Signal Detection: Correlator Technique
The correlator technique in signal detection maximizes the signal-to-noise ratio by correlating the received signal with a known reference template, enhancing the ability to identify the presence of a specific waveform in noisy environments. This method is computationally efficient for real-time processing and robust against noise, making it ideal for applications like radar and communications. Your system's detection accuracy improves significantly when leveraging correlator techniques for matched signal identification.
Mathematical Formulation and Equations
The matched filter maximizes the signal-to-noise ratio (SNR) by convolving the received signal \( r(t) \) with a time-reversed and conjugated version of the known signal \( s(t) \), expressed as \( y(t) = \int r(\tau)s^*(T - \tau) d\tau \), where \( T \) is the signal duration. The correlator computes the similarity between \( r(t) \) and a local replica \( s(t) \) through the cross-correlation function \( R_{rs}(t) = \int r(\tau)s^*(\tau - t) d\tau \), effectively matching signal patterns in time. Both operations are mathematically equivalent under additive white Gaussian noise (AWGN) conditions, with the matched filter specifically optimizing detection performance while the correlator interprets signal alignment.
Performance Comparison: SNR and Detection Efficiency
Matched filters maximize signal-to-noise ratio (SNR) under additive white Gaussian noise, providing optimal detection efficiency for known deterministic signals. Correlators offer similar detection performance but may be less robust in non-Gaussian noise environments due to their reliance on direct signal matching. Consequently, matched filters generally outperform correlators in SNR enhancement and detection accuracy, especially in low-SNR and noisy conditions.
Implementation Complexity and Practical Considerations
Matched filters often require precise knowledge of the expected signal waveform, leading to higher implementation complexity due to the need for exact filter coefficient design and adaptation. Correlators, being conceptually simpler, directly compare received signals with a template, resulting in easier hardware or software implementation but potentially less optimal noise performance. Your choice depends on the balance between available computational resources and the desired detection accuracy in practical communication systems.
Advantages and Limitations of Matched Filters
Matched filters maximize signal-to-noise ratio (SNR) for known signal patterns, providing optimal detection performance in noisy environments and enabling precise time delay estimation. Limitations include sensitivity to inaccuracies in the assumed signal shape and noise statistics, which can degrade performance, as well as increased computational complexity compared to simpler detection methods like correlators. Your choice of a matched filter must consider trade-offs between detection accuracy and implementation cost, especially in dynamic or uncertain signal conditions.
Advantages and Limitations of Correlators
Correlators offer robust signal detection performance by matching received signals to known templates, providing resilience against noise and phase shifts for accurate pattern recognition. Their main advantages include a straightforward implementation and effectiveness in scenarios with varying signal delays or Doppler shifts. Limitations arise from computational intensity in real-time processing and reduced efficiency with non-stationary or highly dynamic signals, requiring adaptive techniques to maintain reliability.
Application Scenarios and Use Case Analysis
Matched filters excel in detecting known signals embedded in noise, making them ideal for radar systems, communications, and sonar applications where maximizing signal-to-noise ratio is critical. Correlators are widely used in synchronization tasks, pattern recognition, and spread spectrum systems, enabling efficient comparison and alignment of signal sequences. Selecting between matched filters and correlators depends on application-specific requirements such as noise environment, computational complexity, and real-time processing needs.
Matched Filter vs Correlator Infographic