An RTOS task and a thread both represent units of execution, but tasks in an RTOS are typically managed with real-time scheduling priorities and timing constraints, whereas threads are lightweight processes often sharing the same resources within an application. Understanding the distinctions between tasks and threads is essential for optimizing your embedded system's performance; explore the rest of this article to deepen your knowledge.
Table of Comparison
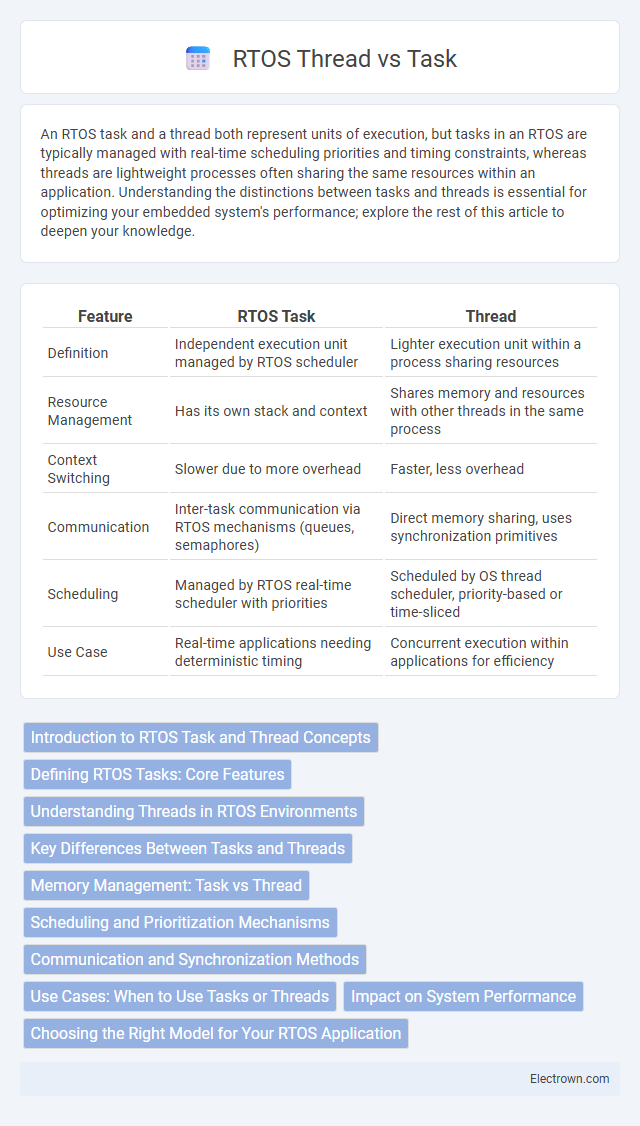
| Feature | RTOS Task | Thread |
|---|---|---|
| Definition | Independent execution unit managed by RTOS scheduler | Lighter execution unit within a process sharing resources |
| Resource Management | Has its own stack and context | Shares memory and resources with other threads in the same process |
| Context Switching | Slower due to more overhead | Faster, less overhead |
| Communication | Inter-task communication via RTOS mechanisms (queues, semaphores) | Direct memory sharing, uses synchronization primitives |
| Scheduling | Managed by RTOS real-time scheduler with priorities | Scheduled by OS thread scheduler, priority-based or time-sliced |
| Use Case | Real-time applications needing deterministic timing | Concurrent execution within applications for efficiency |
Introduction to RTOS Task and Thread Concepts
RTOS tasks represent independent units of execution with dedicated stacks, priority levels, and states managed by the real-time scheduler for precise timing and concurrency control. Threads, often called lightweight processes within tasks, share the same memory space but maintain separate execution contexts, enabling efficient multitasking with minimal overhead. Understanding the distinction between tasks and threads is crucial for optimizing resource allocation and achieving real-time responsiveness in embedded systems.
Defining RTOS Tasks: Core Features
RTOS tasks are independent execution units with dedicated stack memory, priority levels, and states such as ready, running, or blocked. Core features of RTOS tasks include deterministic scheduling, precise timing control, and inter-task communication mechanisms like message queues and semaphores. Each task operates within a controlled environment, ensuring real-time responsiveness and resource isolation essential for embedded system reliability.
Understanding Threads in RTOS Environments
Threads in RTOS environments represent the smallest unit of execution within a task, enabling concurrent operations and efficient CPU utilization. Each thread shares the same task resources such as memory space and I/O, which allows faster context switching compared to switching between separate tasks. Understanding threads helps optimize your system's responsiveness and real-time performance by managing priority and synchronization effectively.
Key Differences Between Tasks and Threads
Tasks in an RTOS are independent units of execution with their own stack and context, often representing distinct processes or functions, whereas threads are lightweight units of execution sharing the same memory space within a task. Threads enable efficient context switching and inter-thread communication due to shared resources, while tasks provide better isolation and fault tolerance by maintaining separate memory and execution environments. Understanding these key differences helps you optimize system design for resource management and responsiveness in real-time applications.
Memory Management: Task vs Thread
In RTOS, tasks operate with independent memory spaces, providing isolated and protected environments that enhance system stability and security. Threads share the same memory space within a task, enabling efficient communication and lower overhead but increasing the risk of data corruption if synchronization is not properly managed. Memory management in tasks requires more resources due to separate stacks and control blocks, while threads benefit from reduced memory usage by sharing code, data segments, and heap.
Scheduling and Prioritization Mechanisms
RTOS tasks and threads employ distinct scheduling and prioritization mechanisms that impact system responsiveness and resource allocation. Tasks in an RTOS generally have assigned priorities that the scheduler uses to manage execution order, with preemptive scheduling enabling higher-priority tasks to interrupt lower-priority ones for timely processing. Understanding these mechanisms ensures your application meets strict real-time constraints by optimizing CPU usage and reducing latency.
Communication and Synchronization Methods
RTOS tasks and threads utilize inter-task communication methods such as message queues, semaphores, and event flags to exchange data efficiently. Synchronization mechanisms like mutexes and binary semaphores ensure resource sharing without race conditions or deadlocks. These communication and synchronization techniques enable deterministic behavior critical for real-time systems.
Use Cases: When to Use Tasks or Threads
Tasks in an RTOS are ideal for managing independent, high-priority functions such as sensor data acquisition or control loops, ensuring real-time responsiveness and deterministic behavior. Threads are better suited for handling subtasks within an application that share resources or require lightweight context switching, like user interface updates or background data processing. Understanding your system's timing constraints and resource sharing needs will help determine whether to implement tasks or threads for optimal performance.
Impact on System Performance
RTOS tasks and threads differ in system performance impact primarily due to their resource management and scheduling overhead. Tasks typically operate independently with separate stack spaces, leading to higher context-switching latency, whereas threads share memory and resources within the same process, enabling faster context switches and lower CPU usage. Efficient thread management in RTOS environments enhances responsiveness and throughput, especially in resource-constrained embedded systems.
Choosing the Right Model for Your RTOS Application
In RTOS applications, choosing between a task and a thread depends on your system's requirements for resource management and concurrency. Tasks typically operate as independent processes with separate contexts, suitable for isolated operations, while threads share the same context and memory, enabling lighter-weight and faster context switches. For optimal performance and scalability in your RTOS environment, evaluate the overhead, communication needs, and synchronization complexity to select the appropriate execution model.
RTOS task vs thread Infographic