RTOS mutexes are specialized synchronization tools designed to prevent priority inversion by allowing only one task to access a shared resource at a time, while semaphores are more versatile signaling mechanisms used for managing resource availability and task synchronization. Understanding the nuances between mutexes and semaphores can help you optimize task coordination in your real-time operating system; explore the rest of the article to learn how to effectively implement both in your applications.
Table of Comparison
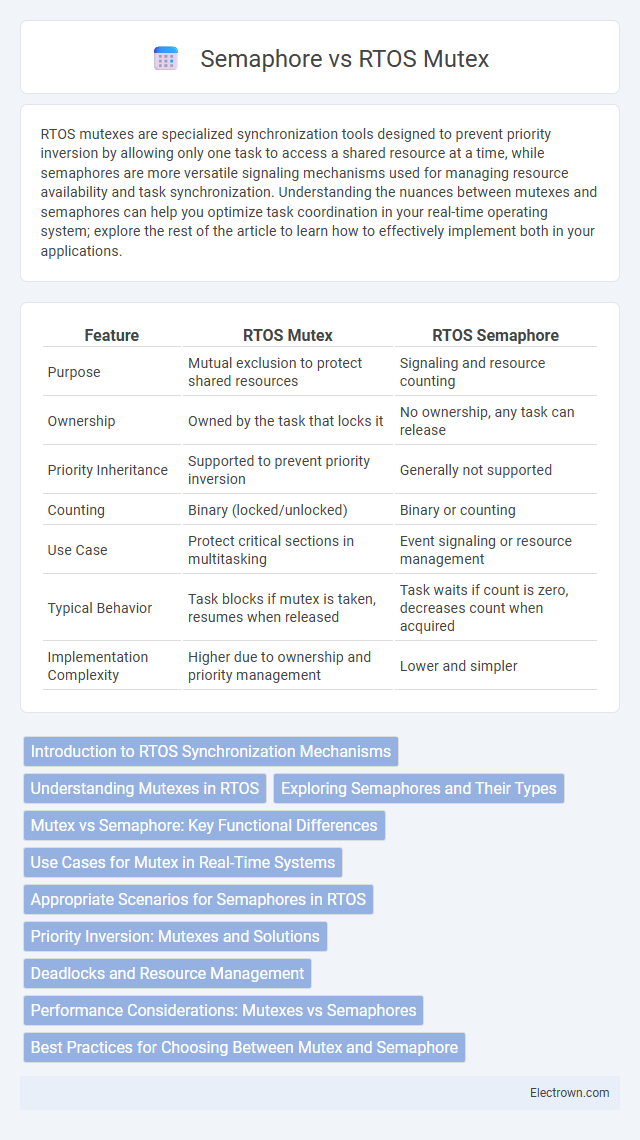
| Feature | RTOS Mutex | RTOS Semaphore |
|---|---|---|
| Purpose | Mutual exclusion to protect shared resources | Signaling and resource counting |
| Ownership | Owned by the task that locks it | No ownership, any task can release |
| Priority Inheritance | Supported to prevent priority inversion | Generally not supported |
| Counting | Binary (locked/unlocked) | Binary or counting |
| Use Case | Protect critical sections in multitasking | Event signaling or resource management |
| Typical Behavior | Task blocks if mutex is taken, resumes when released | Task waits if count is zero, decreases count when acquired |
| Implementation Complexity | Higher due to ownership and priority management | Lower and simpler |
Introduction to RTOS Synchronization Mechanisms
RTOS synchronization mechanisms such as mutexes and semaphores manage access to shared resources, preventing race conditions and ensuring task coordination. A mutex (mutual exclusion) provides exclusive ownership to a single task, allowing safe resource access by locking and unlocking, often with priority inheritance to avoid priority inversion. Semaphores serve broader roles by signaling between tasks, available as binary or counting types, controlling access based on resource count or event occurrence in real-time systems.
Understanding Mutexes in RTOS
Mutexes in RTOS are synchronization primitives designed to manage access to shared resources by multiple tasks, ensuring mutual exclusion and preventing race conditions. Unlike semaphores, mutexes typically include priority inheritance mechanisms to avoid priority inversion, making them suitable for real-time systems requiring predictable task scheduling. Understanding mutex behavior is crucial for developers to implement efficient resource control and maintain system stability in multitasking environments.
Exploring Semaphores and Their Types
Semaphores in an RTOS are synchronization tools that control access to shared resources by multiple tasks, preventing race conditions and ensuring data integrity. They come in two primary types: binary semaphores, which act like mutexes to provide exclusive access to a resource, and counting semaphores, which allow multiple tasks to access a finite number of resource instances simultaneously. Using semaphores effectively helps manage resource contention in your embedded system, improving task coordination and system stability.
Mutex vs Semaphore: Key Functional Differences
Mutexes provide mutual exclusion by allowing only one task to access a critical section at a time, preventing race conditions in RTOS environments. Semaphores manage resource counting or signal events, enabling multiple tasks to synchronize or share resources without strict ownership. Unlike semaphores, mutexes include priority inheritance mechanisms to avoid priority inversion, ensuring real-time task scheduling integrity.
Use Cases for Mutex in Real-Time Systems
Mutexes in real-time operating systems are primarily used for mutual exclusion to protect shared resources from concurrent access, ensuring data integrity and preventing race conditions. Your system benefits from mutexes when tasks require exclusive access to hardware peripherals, critical data structures, or communication channels, especially in priority-based scheduling environments. Unlike semaphores, mutexes often include priority inheritance mechanisms, which help avoid priority inversion and maintain system responsiveness in time-sensitive applications.
Appropriate Scenarios for Semaphores in RTOS
Semaphores in RTOS are ideal for managing resource access among multiple tasks where signaling between producers and consumers is necessary, such as controlling access to shared buffers or synchronizing event occurrences. Counting semaphores efficiently handle scenarios involving limited resource pools, like managing available memory blocks or peripheral interfaces. Binary semaphores are suited for simple task synchronization without ownership requirements, commonly used to signal the completion of interrupt service routines.
Priority Inversion: Mutexes and Solutions
Priority inversion occurs when a lower-priority task holds a mutex needed by a higher-priority task, causing the higher-priority task to wait. Mutex implementations often include priority inheritance protocols that temporarily raise the priority of the mutex holder to that of the waiting higher-priority task, minimizing delays. Semaphores lack this built-in mechanism, making mutexes more effective for managing priority inversion and ensuring real-time system responsiveness.
Deadlocks and Resource Management
RTOS mutexes prevent deadlocks by enforcing priority inheritance, ensuring that higher-priority tasks are not indefinitely blocked while waiting for a locked resource. Semaphores provide more flexible resource management by allowing multiple tasks to access shared resources up to a defined limit but can lead to deadlocks if not carefully handled due to improper signaling. Effective use of mutexes is critical for exclusive resource control, whereas semaphores suit managing multiple instances of a resource, both requiring careful design to avoid deadlocks and ensure optimal concurrency.
Performance Considerations: Mutexes vs Semaphores
Mutexes offer better performance in scenarios requiring strict ownership and priority inheritance, reducing priority inversion risks in real-time operating systems. Semaphores provide more flexibility but can introduce overhead due to potential context switches and lack ownership tracking. Your choice between mutex and semaphore should consider task synchronization complexity and the criticality of real-time responsiveness.
Best Practices for Choosing Between Mutex and Semaphore
Choosing between mutex and semaphore in RTOS depends on the synchronization requirements and resource management. Mutex is best suited for mutual exclusion to avoid priority inversion and ensure resource ownership by a single task, whereas semaphore is ideal for signaling and managing access to multiple resources or event counting. Use mutex for protecting critical sections and binary semaphore for signaling between tasks or interrupt handlers.
RTOS mutex vs semaphore Infographic