POSIX RTOS adheres to the Portable Operating System Interface standards, ensuring compatibility and ease of application portability across different POSIX-compliant systems, while non-POSIX RTOS may offer optimized performance and specialized features without strict standardization. To understand which RTOS suits your project requirements better, explore the detailed comparison in the following article.
Table of Comparison
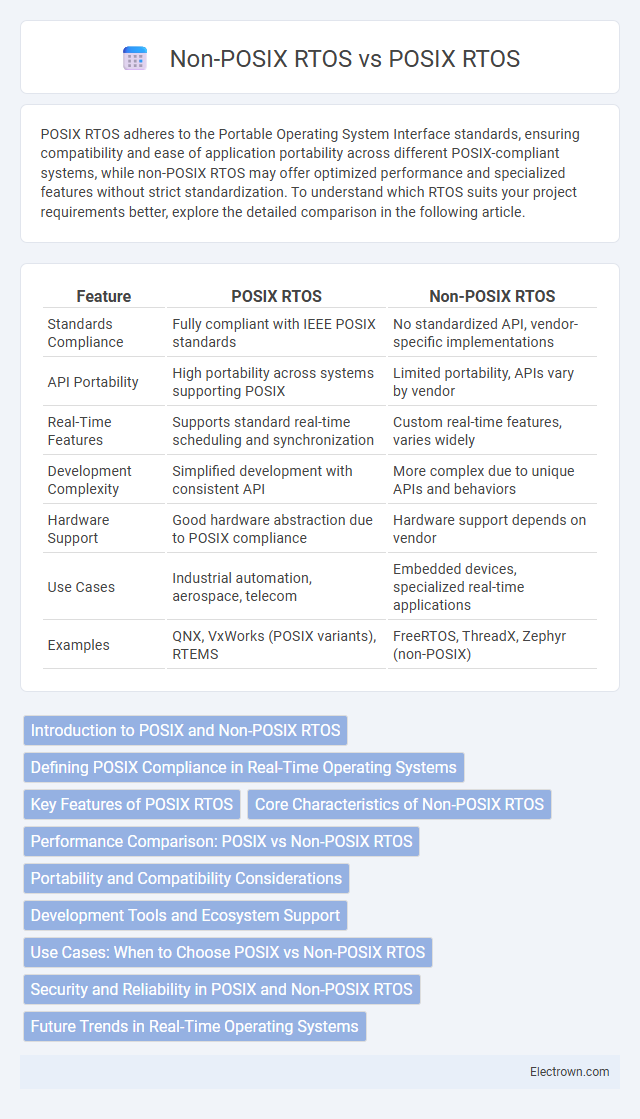
| Feature | POSIX RTOS | Non-POSIX RTOS |
|---|---|---|
| Standards Compliance | Fully compliant with IEEE POSIX standards | No standardized API, vendor-specific implementations |
| API Portability | High portability across systems supporting POSIX | Limited portability, APIs vary by vendor |
| Real-Time Features | Supports standard real-time scheduling and synchronization | Custom real-time features, varies widely |
| Development Complexity | Simplified development with consistent API | More complex due to unique APIs and behaviors |
| Hardware Support | Good hardware abstraction due to POSIX compliance | Hardware support depends on vendor |
| Use Cases | Industrial automation, aerospace, telecom | Embedded devices, specialized real-time applications |
| Examples | QNX, VxWorks (POSIX variants), RTEMS | FreeRTOS, ThreadX, Zephyr (non-POSIX) |
Introduction to POSIX and Non-POSIX RTOS
POSIX RTOS adheres to the Portable Operating System Interface standards, ensuring compatibility and portability across different hardware platforms by providing a consistent API for real-time tasks, threading, and synchronization. Non-POSIX RTOS, in contrast, may offer proprietary or customized interfaces tailored for specific applications or hardware, often optimizing performance but sacrificing cross-platform interoperability. The choice between POSIX and non-POSIX RTOS depends on the requirements for standard compliance, ecosystem support, and real-time capabilities in embedded system development.
Defining POSIX Compliance in Real-Time Operating Systems
POSIX compliance in Real-Time Operating Systems (RTOS) ensures standardized application programming interfaces (APIs) for multitasking, signaling, and synchronization, facilitating portability and interoperability across diverse hardware platforms. POSIX RTOS adheres to IEEE 1003.1 standards, offering predictable timing behavior and robust task management suitable for critical real-time applications. Choosing a POSIX-compliant RTOS enhances your system's scalability and simplifies integration with existing software ecosystems compared to non-POSIX RTOS, which may lack such standardized interfaces and exhibit proprietary or inconsistent behavior.
Key Features of POSIX RTOS
POSIX RTOS offers standardized APIs for real-time task management, inter-process communication, and synchronization, enabling portability and compatibility across different systems. These operating systems provide predictable timing behavior essential for hard real-time applications by supporting priority scheduling and real-time clocks. Your development process benefits from the wide adoption of POSIX standards, facilitating easier integration and maintenance of complex embedded systems.
Core Characteristics of Non-POSIX RTOS
Non-POSIX RTOS typically feature proprietary APIs tailored for specific hardware platforms, offering highly optimized performance with minimal resource overhead. These systems prioritize deterministic timing and fast interrupt handling but lack the standardization found in POSIX-compliant RTOS, which can limit cross-platform portability and integration. Non-POSIX RTOS often excel in embedded applications requiring strict real-time constraints and customized functionality not bound by POSIX API specifications.
Performance Comparison: POSIX vs Non-POSIX RTOS
Performance comparison between POSIX and non-POSIX RTOS reveals that non-POSIX RTOS often deliver lower latency and faster context switching due to their lightweight, specialized kernels. POSIX-compliant RTOS provide standardized APIs that enhance portability and scalability but may introduce additional overhead impacting real-time responsiveness. Your choice depends on whether optimizing raw performance or maintaining compatibility with POSIX standards is the priority for your application.
Portability and Compatibility Considerations
POSIX RTOS offers superior portability due to its standardized API, enabling seamless application migration across compliant systems without significant code modifications. Non-POSIX RTOS variants often provide proprietary interfaces, resulting in limited compatibility and increased development effort during porting. Emphasizing POSIX compliance facilitates interoperability and long-term maintainability in diverse embedded environments.
Development Tools and Ecosystem Support
POSIX RTOS offers extensive development tools and ecosystem support, including compatibility with standard POSIX APIs, a wide range of debugging utilities, and integration with popular IDEs like Eclipse and Visual Studio Code. Non-POSIX RTOS often have proprietary or limited toolchains that can restrict developer productivity and require specialized knowledge. The broad ecosystem of POSIX RTOS accelerates application development, testing, and deployment through robust community and third-party support.
Use Cases: When to Choose POSIX vs Non-POSIX RTOS
POSIX RTOS is ideal for applications requiring compatibility with standard UNIX APIs, such as complex embedded systems needing portability and real-time performance, including telecommunications and aerospace. Non-POSIX RTOS is better suited for highly specialized, resource-constrained devices with unique timing and scheduling requirements where minimal footprint and maximum efficiency are critical. Your choice depends on whether standardization and cross-platform code reuse or tailored performance and minimal overhead are the primary priorities.
Security and Reliability in POSIX and Non-POSIX RTOS
POSIX RTOS standards enforce stringent security protocols and reliable multitasking, ensuring consistent real-time performance critical for mission-critical applications. Non-POSIX RTOS may lack these uniform standards, potentially leading to varied security implementations and less predictable reliability across different platforms. Your choice of a POSIX-compliant RTOS enhances system security and reliability through standardized APIs and well-established real-time scheduling policies.
Future Trends in Real-Time Operating Systems
Future trends in real-time operating systems (RTOS) emphasize increased POSIX compliance to enhance interoperability, portability, and scalability across diverse hardware platforms. POSIX RTOS continue to gain traction in industrial automation, automotive systems, and IoT applications due to their standardized APIs facilitating easier integration with legacy software and real-time extensions. Non-POSIX RTOS often prioritize specialized, low-latency performance for deeply embedded systems but face challenges as demand grows for unified, secure, and maintainable codebases in complex real-time environments.
POSIX RTOS vs non-POSIX RTOS Infographic