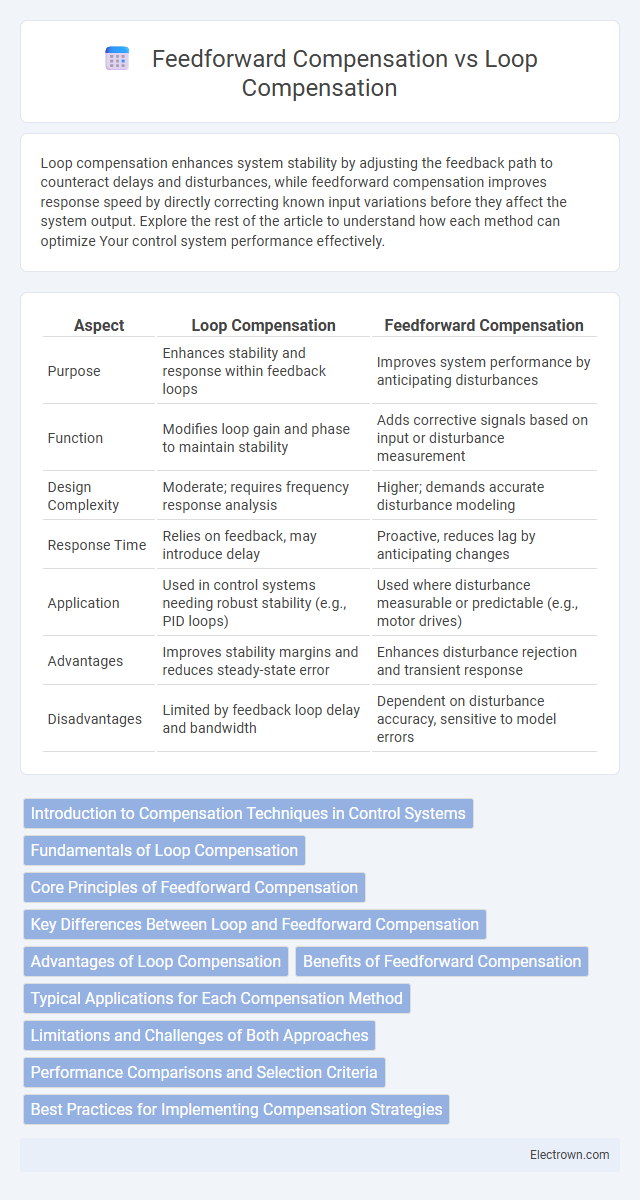
Loop compensation enhances system stability by adjusting the feedback path to counteract delays and disturbances, while feedforward compensation improves response speed by directly correcting known input variations before they affect the system output. Explore the rest of the article to understand how each method can optimize Your control system performance effectively.
Table of Comparison
| Aspect | Loop Compensation | Feedforward Compensation |
|---|---|---|
| Purpose | Enhances stability and response within feedback loops | Improves system performance by anticipating disturbances |
| Function | Modifies loop gain and phase to maintain stability | Adds corrective signals based on input or disturbance measurement |
| Design Complexity | Moderate; requires frequency response analysis | Higher; demands accurate disturbance modeling |
| Response Time | Relies on feedback, may introduce delay | Proactive, reduces lag by anticipating changes |
| Application | Used in control systems needing robust stability (e.g., PID loops) | Used where disturbance measurable or predictable (e.g., motor drives) |
| Advantages | Improves stability margins and reduces steady-state error | Enhances disturbance rejection and transient response |
| Disadvantages | Limited by feedback loop delay and bandwidth | Dependent on disturbance accuracy, sensitive to model errors |
Introduction to Compensation Techniques in Control Systems
Loop compensation enhances system stability and performance by adjusting feedback signals to minimize errors, while feedforward compensation improves response speed by anticipating disturbances through additional control inputs. Both techniques optimize control systems by influencing the system dynamics, but loop compensation relies on error correction whereas feedforward compensation uses predictive adjustments. Understanding these methods helps you design more precise and resilient control systems tailored to specific application requirements.
Fundamentals of Loop Compensation
Loop compensation stabilizes feedback control systems by adjusting the frequency response to ensure desired phase margin and gain margin, preventing oscillations and enhancing system robustness. It typically involves modifying the loop gain through components like phase lead or lag networks to achieve precise error correction and steady-state performance. Understanding the fundamentals of loop compensation helps you design controllers that maintain system stability and performance under varying operating conditions.
Core Principles of Feedforward Compensation
Feedforward compensation anticipates disturbances and corrects the output before deviations occur by using a model of the system and measured disturbance signals. It operates independently from the feedback loop, aiming to improve system response speed and reduce steady-state error without relying on error signals. Core principles include accurate disturbance measurement, precise system modeling, and real-time adjustment to counteract known disturbances proactively.
Key Differences Between Loop and Feedforward Compensation
Loop compensation modifies the feedback control loop to improve system stability and dynamic response by adjusting parameters like gain and phase margin. Feedforward compensation bypasses the feedback loop by directly correcting for disturbances or reference changes, enhancing system accuracy and speed without affecting stability margins. The key differences lie in their implementation: loop compensation influences stability and robustness through feedback adjustment, while feedforward compensation enhances transient performance by anticipating disturbances.
Advantages of Loop Compensation
Loop compensation enhances system stability by improving phase margin and reducing steady-state error, which ensures reliable performance in feedback control systems. It effectively counters disturbances and parameter variations, allowing your control system to maintain desired output despite external changes. This method is widely preferred for its ability to provide robust dynamic response and precise regulation in various engineering applications.
Benefits of Feedforward Compensation
Feedforward compensation improves system performance by proactively counteracting disturbances before they affect the output, leading to faster response times and enhanced stability. It reduces reliance on feedback loops, minimizing overshoot and oscillations in control systems. This approach is particularly beneficial in applications requiring precise control under varying input conditions and external disturbances.
Typical Applications for Each Compensation Method
Loop compensation is typically employed in control systems requiring stability and robustness, such as motor speed controllers, voltage regulators, and power supplies, where feedback adjusts output to maintain desired performance. Feedforward compensation is often used in processes with measurable disturbances or predictable inputs, including temperature control systems, robotics, and signal processing, to improve response speed and reduce steady-state error by anticipating changes. Selecting between loop and feedforward compensation depends on system dynamics and disturbance characteristics, optimizing control accuracy and efficiency in various industrial applications.
Limitations and Challenges of Both Approaches
Loop compensation often faces stability and bandwidth trade-offs, limiting system responsiveness and increasing sensitivity to parameter variations. Feedforward compensation challenges include the need for accurate disturbance measurement and model precision, making it less effective in unpredictable environments. Both approaches grapple with implementation complexity and robustness, demanding careful design to avoid performance degradation under real-world conditions.
Performance Comparisons and Selection Criteria
Loop compensation offers robust stability and improved disturbance rejection by adjusting the feedback path, making it ideal for systems requiring precise control of steady-state errors and noise suppression. Feedforward compensation enhances system performance by proactively counteracting known disturbances and input changes, providing faster transient response without affecting system stability margins. Your choice depends on the application's sensitivity to disturbances, speed of response needed, and the system complexity, with loop compensation favored for stability-critical environments and feedforward preferred for minimizing output fluctuations in predictable disturbance scenarios.
Best Practices for Implementing Compensation Strategies
Effective implementation of loop compensation requires careful tuning of the feedback path to ensure system stability and optimal transient response while minimizing overshoot. Feedforward compensation enhances system performance by actively canceling disturbances and improving tracking accuracy, often best applied when the disturbance model is well known. Your control strategy benefits most from a combined approach, where loop compensation maintains robustness and feedforward compensation optimizes responsiveness under predictable conditions.
Loop compensation vs feedforward compensation Infographic